 ابزار آلات برقی و شارژی
ابزار آلات برقی و شارژی ابزار آلات جوش و برش
ابزار آلات جوش و برش ابزار بادی
ابزار بادی ابزار بنزینی و موتوری
ابزار بنزینی و موتوری ابزار دستی
ابزار دستی ابزار و تجهیزات ایمنی
ابزار و تجهیزات ایمنی ابزار برش و سایش
ابزار برش و سایش لوازم جانبی ابزار آلات
لوازم جانبی ابزار آلات یراق آلات
یراق آلات
اگر بخواهیم در یک خط بگوییم که PWM چیست، می توان گفت: PWM یا مدولاسیون پهنای پالس روشی هوشمند برای کنترل توان با روشن و خاموش کردن سریع سیگنال است؛ ممکن است در ذهن خود این سوال را نیز داشته باشید که اینورتر PWM چیست؟
کارشناسان ما به طور خلاصه می گویند: اینورتر PWM نیز همچون یک اینورتر ساده، دستگاهی است که با استفاده از مدولاسیون پهنای پالس ولتاژ DC را به برق AC با فرکانس و ولتاژ قابل تنظیم تبدیل می کند.
با ما همراه باشید تا ببینیم این تکنیک چگونه پایه گذار کنترل دقیق در دنیای الکترونیک شده است.
PWM چیست؟

PWM به معنی «مدولاسیون پهنای پالس» یکی از روش های پرکاربرد در الکترونیک است که برای شبیه سازی سیگنال آنالوگ با استفاده از سیگنال دیجیتال به کار می رود. در این روش، ولتاژ خروجی بین دو سطح صفر و یک (یا 0 و 5 ولت، بسته به مدار) به صورت متناوب قطع و وصل می شود تا مقدار متوسط آن مشابه با یک ولتاژ پیوسته (آنالوگ) به نظر برسد.
شاید برایتان جالب باشد که PWM مخفف چیست. PMW مخفف عبارت Pulse Width Modulation است.
در واقع، سیگنال PWM یک موج مربعی است که در هر دوره ی تناوبی (T) برای مدت زمان مشخصی روشن (ON) و در بقیه زمان خاموش (OFF) است. اگرچه شکل موج خروجی ذاتاً دیجیتال است، اما میانگین ولتاژ در طول زمان می تواند نقش یک مقدار آنالوگ را بازی کند.
به عنوان مثال، وقتی نیمی از زمان روشن و نیمی خاموش باشد، ولتاژ متوسط خروجی تقریباً نصف ولتاژ ورودی خواهد بود. نکته جالبی که وجود دارد و ما آن را به نقل از سایت Circuit Bread می آوریم این است:
ما می توانیم موتورها، چراغ ها، محرک ها و موارد دیگر را با استفاده از سیگنال PWM تولید شده کنترل کنیم. نکته مهمی که باید در اینجا به آن توجه داشت این است که PWM یک سیگنال آنالوگ واقعی نیست. سیگنال دیجیتال به گونه ای اصلاح می شود که یک سیگنال آنالوگ جعلی باشد.
چرخه کاری (Duty Cycle) چیست؟

چرخه کاری (Duty Cycle) یکی از مفاهیم کلیدی در درک عملکرد PWM محسوب می شود. این اصطلاح نشان دهندۀ نسبت زمان روشن بودن پالس به کل زمان یک دوره تناوب است و معمولاً با درصد بیان می شود.
در واقع، این پارامتر تعیین می کند که در هر دوره تناوب (T)، چند درصد از زمان سیگنال در سطح ولتاژ بالا (HIGH) بماند.
برای محاسبه نسبت روشن بودن (Duty Cycle) از رابطه زیر استفاده می شود:
Duty (%) = (tON / T) × 100
که در آن:
- tON زمان روشن بودن سیگنال است.
- T دوره تناوب کل موج است.
ولتاژ متوسط خروجی نیز بهصورت زیر بیان می شود:
Vout(avg) = Vin × (Duty / 100)
اگر ولتاژ ورودی 12 ولت باشد و چرخه کاری 50٪ تنظیم شود، خروجی میانگین به صورت زیر خواهد بود:
Vout = 12 × 0.5 = 6 ولت (میانگین)
فرکانس PWM چیست؟

فرکانس PWM تعداد دفعات تکرار پالس در هر ثانیه است و برحسب هرتز (Hz) بیان می شود. همچنین تعیین می کند که این روشن و خاموش شدن ها با چه سرعتی انجام شوند.
رابطه بین فرکانس و دوره تناوب به شکل زیر است:
f = 1 / T
که در آن:
f: فرکانس (Hz)
T: دوره تناوب موج (ثانیه)
فرکانس بالا یعنی پالس ها در فواصل زمانی کوتاه تری تکرار می شوند و در نتیجه خروجی، پیوسته تر به نظر می رسد.
نکته کاربردی: انتخاب فرکانس مناسب باید بین سه عامل تعادل برقرار کند:
راندمان سوئیچینگ، نویز صوتی، و پاسخ بار.
برای مثال: در کنترل LED معمولاً از فرکانس بالای 100 هرتز استفاده می شود تا چشم انسان چشمک را احساس نکند.
در موتورهای DC، فرکانس حدود 15 تا 25 کیلوهرتز رایج است تا هم صدای قابل شنیدن حذف شود و هم تلفات سوئیچینگ زیاد نشود.
تأثیر چرخه کاری بر ولتاژ خروجی چگونه است؟
ولتاژ میانگین خروجی در PWM متناسب با نسبت زمان روشن بودن پالس است.
در بخش قبل دیدم که رابطه ساده چرخه کاری به چه شکلی است. جدول زیر این رابطه را کمی بیشتر توضیح می دهد:
| Duty Cycle (چرخه کاری) | حالت سیگنال | ولتاژ متوسط خروجی |
| ۰٪ | کاملاً خاموش | ۰ ولت |
| ۵۰٪ | نیمی از زمان روشن | ۰٫۵ × Vin |
| ۱۰۰٪ | کاملاً روشن | Vin |
♦️ نکته: این مقدار میانگین ولتاژ است، نه مقدار مؤثر (RMS).
در کاربردهایی مثل موتور DC، خاصیت القایی موتور سیگنال را هموار کرده و باعث می شود جریان تقریباً یکنواخت شود، در حالی که برای بار مقاومتی (مثل لامپ یا هیتر)، میانگین توان دقیقاً به Duty وابسته است.
تفاوت بین چرخه کاری و فرکانس PWM چیست؟

- Duty Cycle:تعیین می کند چه نسبتی از هر دوره، سیگنال روشن باشد.
- فرکانس: مشخص می کند چند بار در ثانیه این چرخه تکرار شود.
افزایش فرکانس باعث می شود چشم یا گوش انسان دیگر تغییرات را احساس نکند. به عنوان مثال:
- در PWM LED با فرکانس بیش از 100 هرتز، چشم انسان دیگر چشمک زدن را نمی بیند.
- در PWM موتور DC، فرکانس های بالا باعث حرکت نرم تر موتور می شوند، اما تلفات سوئیچینگ در ترانزیستور نیز افزایش پیدا می کند.
♦️ نکته: انتخاب فرکانس مناسب همیشه بین سه عامل راندمان، نویز و پاسخ سیستم تعادل برقرار می کند.
برای کنترل سرعت موتورهای DC کوچک، معمولاً از فرکانس 15 تا 25 کیلوهرتز استفاده می شود تا صدای قابل شنیدن حذف شود.
تفاوت فرکانس PWM و چرخه کاری:
| ویژگی | چرخه کاری (Duty Cycle) | فرکانس PWM |
| تعریف | نسبت زمان روشن بودن پالس به کل دوره تناوب | تعداد پالسها در هر ثانیه |
| واحد | درصد (%) | هرتز (Hz) |
| نقش | تعیین مقدار متوسط ولتاژ خروجی | تعیین سرعت سوئیچزدن و کیفیت سیگنال |
| اثر بر عملکرد | کنترل توان خروجی | کنترل نرمی عملکرد و حذف نویز شنیداری |
تفاوت میانگین و مؤثر (RMS)

در تحلیل سیگنال های PWM باید تفاوت بین «ولتاژ میانگین» و «ولتاژ مؤثر (RMS)» را بدانیم. این دو مفهوم یکی نیستند و هرکدام کاربرد خاصی دارند.
میانگین (Average): در PWM برای محاسبه مقدار ولتاژ متوسط به کار می رود و مستقیماً با چرخه کاری مرتبط است:
Vout(avg) = D × Vin
مؤثر (RMS): برای محاسبه توان واقعی یا تلفات حرارتی در بارهای مقاومتی استفاده می شود. برای یک موج مربعی با دامنه Vin و چرخه کاری D داریم:
Vrms = Vin × √D
♦️ نکته: در کاربردهای کنترلی، معمولاً از ولتاژ میانگین برای تنظیم سرعت موتور یا شدت نور استفاده می شود؛ اما در طراحی حرارتی و محاسبه تلفات، مقدار مؤثر اهمیت دارد.
فرکانس PWM چطور کار می کند و چگونه ولتاژ متوسط را کنترل می کند؟

برای اینکه دقیق تر بدانیم PWM چیست، باید با شیوه عملکرد آن آشنا شویم.
در روش مدولاسیون پهنای پالس، ولتاژ ورودی ثابت است اما مدت زمان روشن بودن پالس ها (چرخه کاری) تغییر می کند. همین تغییر باعث می شود مقدار ولتاژ متوسط خروجی و در نتیجه توان منتقل شده، قابل تنظیم باشد.
نحوه عملکرد به زبان ساده:
فرض کنید یک کلید الکترونیکی (مثل ترانزیستور) به صورت بسیار سریع، مدام بین حالت روشن و خاموش جا به جا می شود:
- در حالت روشن (ON): ولتاژ کامل منبع به بار اعمال می شود.
- در حالت خاموش (OFF): هیچ ولتاژی به بار نمی رسد.
تغییر زمان های ON و OFF باعث می شود ولتاژ متوسط خروجی بین ۰ تا مقدار کامل منبع تغییر کند.
به عنوان مثال، اگر چرخه کاری ۵۰٪ باشد، خروجی نصف ولتاژ ورودی خواهد بود؛ چون در نیمی از زمان پالس روشن است.
| چرخه کاری | زمان روشن بودن پالس | ولتاژ متوسط خروجی | نتیجه |
| 25٪ | یک چهارم کل زمان | کم | توان پایین |
| 50٪ | نصف زمان | متوسط | توان متعادل |
| 75٪ | سه چهارم زمان | زیاد | توان بالا |
کنترل توان با PWM چگونه انجام می شود؟

در مدارهایی مثل اینورتر، منابع تغذیه یا درایو موتور، این تغییر پهنای پالس باعث می شود بتوان توان خروجی را با دقت بالا و بدون اتلاف زیاد انرژی کنترل کرد. در واقع به جای اینکه مقاومت یا افت ولتاژ باعث کاهش توان شود، خاموش و روشن شدن سریع کلیدها این وظیفه را بر عهده می گیرد؛ روشی بسیار کارآمد، خنک و دقیق.
به زبان ساده، PWM مغز دیجیتالِ کنترل توان آنالوگ است؛ یعنی با بازی هوشمندانه بین زمان روشن و خاموش، انرژی دقیقاً به اندازه ی نیاز به بار منتقل می شود.
مزایای PWM چیست؟

پهنای پالس روشی است که نه تنها کنترل دقیقی روی توان خروجی فراهم می کند، بلکه بهره وری سیستم را هم به شکل قابل توجهی افزایش می دهد.
در ادامه مهم ترین مزایای PWM را به زبانی ساده مرور می کنیم :
بازده انرژی بالا
در PWM، به جای تغییر مستقیم ولتاژ، کلیدها تنها بین حالت روشن و خاموش سوئیچ می شوند. این یعنی اتلاف انرژی بسیار کم، چون در حالت های کاملاً روشن یا خاموش، تلفات حرارتی در حداقل میزان است.
کنترل دقیق ولتاژ و توان
با تنظیم چرخه کاری، می توان ولتاژ متوسط خروجی را به دقت دلخواه تنظیم کرد. این ویژگی در درایوهای موتور، منابع تغذیه و اینورترها حیاتی است.
حذف نویز شنیداری و عملکرد نرم تر
در کاربردهایی مثل کنترل سرعت موتور یا تنظیم نور LED، انتخاب فرکانس PWM مناسب باعث می شود حرکت موتور روان تر و بدون صدا و نور خروجی یکنواخت تر باشد.
بیشتر بخوانید: انواع لامپ LED
پاسخ سریع به تغییرات بار
از آنجا که PWM دیجیتالی عمل می کند، سیستم می تواند در زمان کوتاه به تغییرات ولتاژ یا جریان پاسخ دهد؛ بنابراین پایداری و دقت عملکرد بالا می رود.
صرفه جویی در هزینه و فضا
مدارهای مبتنی بر PWM ساده تر، کوچک تر و ارزان تر از روش های آنالوگ مشابه هستند، چون نیازی به مقاومت های متغیر یا قطعات حجیم ندارند.
در مجموع، PWM روشی است که بین سادگی، دقت و بازدهی انرژی تعادل کامل برقرار می کند. به همین دلیل، از منابع تغذیه سوئیچینگ گرفته تا اینورترهای صنعتی، همه به نوعی از این فناوری بهره می برند.
معایب PWM چیست و چه محدودیت هایی دارد؟
با وجود تمام مزایایی که در پاسخ به سؤال «PWM چیست» گفتیم، این روش خالی از ایراد نیست. مدولاسیون پهنای پالس اگر درست طراحی یا اجرا نشود، می تواند باعث بروز مشکلات فنی و کاهش کارایی سیستم شود. در ادامه، به مهم ترین معایب آن اشاره می کنم
ایجاد نویز الکترومغناطیسی (EMI)
در PWM به دلیل سوئیچ زدن سریع کلیدها، تداخل الکترومغناطیسی ایجاد می شود. این نویزها ممکن است روی تجهیزات اطراف یا حسگرهای حساس اثر بگذارند و نیاز به فیلترگذاری و شیلدینگ مناسب دارند.
نیاز به فیلتر در خروجی
سیگنال PWM ماهیت مربعی دارد، نه سینوسی. برای اینکه خروجی به شکل یک موج نرم و پایدار درآید، معمولاً باید از فیلترهای LC استفاده شود. این فیلترها هزینه و حجم مدار را افزایش می دهند.
تلفات سوئیچینگ در فرکانس بالا
هرچه فرکانس سوئیچ زدن بالاتر رود، تلفات ناشی از تغییر وضعیت کلیدها (ترانزیستورها) بیشتر می شود و ممکن است موجب گرمایش اضافی در مدار شود.
پیچیدگی طراحی مدار کنترل

برای تولید پالس های دقیق با زمان بندی درست، نیاز به مدارهای کنترل پیشرفته یا میکروکنترلر است. این موضوع طراحی و برنامه نویسی را کمی دشوارتر می کند.
تأثیر منفی بر عمر قطعات
در کاربردهای سنگین یا با جریان بالا، روشن و خاموش شدن مکرر کلیدها می تواند در طول زمان باعث فرسودگی سریع تر قطعات نیمه هادی شود.
در مجموع، هرچند PWM یکی از کارآمدترین روش های کنترل توان است، اما برای رسیدن به عملکرد ایده آل باید بین فرکانس، چرخه کاری، فیلتر و طراحی مدار تعادل دقیقی برقرار شود.
راهنمای کاهش EMI/نویز در مدارهای PWM
سوئیچزنی سریع در PWM میتواند نویز الکترومغناطیسی (EMI) ایجاد کند. برای کاهش تداخلها و بهبود پایداری، این نکات عملی را رعایت کنید:
- حلقه جریان سوئیچینگ را کوچک کنید: مسیر رفت و برگشت جریان سوئیچ (کلید تا بار و زمین) را کوتاه و پهن نگه دارید تا اندوکتانس مسیر کم شود.
- چیدمان زمین مناسب: از زمین ستاره ای یا پلن زمین یکپارچه استفاده کنید؛ مسیرهای سیگنال حساس را از مسیرهای پرجریان دور نگه دارید.
- Snubber و مقاومت گیت: برای ترانزیستورها (MOSFET/IGBT) از شبکه Snubber و مقاومت گیت استفاده کنید تا dV/dt و dI/dt کنترل شود.
- دیود هرزگرد برای بارهای القایی: روی بارهای القایی (موتور/سلف) دیود هرزگرد موازیِ معکوس قرار دهید تا ضربه های ولتاژی مهار شوند.
- فیلترگذاری: از فیلتر LC در ورودی/خروجی استفاده کنید؛ مقدار و کیفیت قطعات (ESR/ESL) را در محاسبات لحاظ کنید.
- شیلدینگ و تفکیک ناحیه ای: بخش قدرت و بخش سیگنال را از هم جدا کنید؛ در صورت نیاز از شیلد فلزی/مسیرهای محافظ استفاده کنید.
- سیم کشی و کابل ها: کابل بارهای پرجریان را پیچیده (twisted) و در صورت لزوم شیلددار انتخاب کنید؛ مسیر موازی با ورودی های آنالوگ را پرهیز کنید.
- فرکانس سوئیچینگ مناسب: فرکانس را طوری انتخاب کنید که هم خارج از باند شنوایی/حساسیت کاربرد باشد و هم تلفات سوئیچینگ قابل قبول بماند.
♦️ نکته: اندازه گیری EMI با اسکوپ (پراپ تفاضلی/کرنت پراپ) و آزمون های مرحله ای، قبل از نهایی سازی سخت افزار، از بازطراحی پرهزینه جلوگیری می کند.
کاربردهای PWM چیست و در چه دستگاه هایی استفاده می شود؟

درک درست از اینکه PWM چیست تنها با شناخت کاربردهای آن کامل می شود. این تکنیک به دلیل دقت بالا، بازده مناسب و کنترل نرم، تقریباً در تمام حوزه های الکترونیک و برق قدرت حضور دارد. در ادامه، رایج ترین موارد استفاده از PWM را بررسی می کنیم.
کنترل توان خروجی
PWM روشی بسیار مؤثر برای تنظیم میزان انرژی تحویلی به بارهای الکتریکی است.
- کنترل شدت نور LED ها: با تغییر چرخه کاری، می توان نور را بدون تغییر رنگ یا افت کیفیت تنظیم کرد.
- تنظیم حرارت المنت ها و هیترها: در سیستم های گرمایشی صنعتی یا خانگی، PWM باعث کنترل دقیق دما و کاهش مصرف انرژی می شود.
کنترل سرعت و موقعیت موتورها
یکی از مهم ترین کاربردهای PWM در درایو موتورهای DC و سروو موتور است.
در موتورهای DC، با تغییر چرخه کاری می توان دور چرخش را به صورت پیوسته کنترل کرد، بدون اینکه تلفات حرارتی افزایش یابد.
در سروو موتورها، PWM برای تعیین زاویۀ موقعیت محور موتور استفاده می شود؛ هر پهنای پالس معادل زاویه ای مشخص است.
نتیجه: حرکت دقیق، روان و کاملاً قابل پیش بینی.
نکته مهم در مورد بارهای القایی و دیود هرزگرد

در زمان استفاده از PWM برای کنترل موتورهای DC یا سایر بارهای القایی، حتماً باید تأثیر میدان مغناطیسی ذخیره شده در سیم پیچ ها را در نظر گرفت. هنگام خاموش شدن کلید، انرژی ذخیره شده در سیم پیچ می تواند باعث ایجاد پالس های ولتاژی شدید شود که به ترانزیستور یا مدار آسیب می زند.
برای محافظت از مدار، از دیود هرزگرد (Flyback Diode) به صورت موازی با بار استفاده کنید. این دیود مسیر امنی برای جریان القایی فراهم می کند تا هنگام قطع پالس، انرژی به صورت کنترل شده تخلیه شود.
نکات طراحی:
- از دیودهای سریع و با جریان کافی (مثل 1N5819 یا FR107) استفاده کنید.
- در کاربردهای جریان بالا، دیود را نزدیک بار نصب کنید تا مسیر جریان القایی کوتاه بماند.
- در موتورهای بزرگ یا سلف های قدرت، از مدار Snubber یا TVS نیز برای محافظت بهتر بهره ببرید.
نتیجه: با اضافه کردن تنها یک دیود هرزگرد ساده، می توان عمر قطعات و پایداری عملکرد مدار PWM را به طور چشمگیری افزایش داد.
PWM در سرووهای RC چه تفاوتی با PWM توان دارد؟
سروو موتورهای RC (مدل رادیویی) از سیگنالی استفاده می کنند که ظاهراً شبیه PWM است، اما در واقع کارکرد متفاوتی دارد.
در سرووهای RC: پالس هایی با فرکانس حدود 50 Hz ارسال می شود و عرض پالس زاویه محور را تعیین می کند:
- پالس 1 میلیثانیه → زاویه حدود 0 درجه
- پالس 1.5 میلیثانیه → زاویه میانی (≈ 90 درجه)
- پالس 2 میلیثانیه → زاویه حداکثر (≈ 180 درجه)
عرض پالس بیانگر موقعیت مکانیکی است و هیچ «میانگین گیری ولتاژی» وجود ندارد.
در PWM توان (Power PWM): همانطور که در کنترل موتور DC یا روشنایی LED استفاده می شود، چرخه کاری مستقیماً روی ولتاژ متوسط خروجی تأثیر می گذارد:
Vout(avg) = D × Vin
نتیجه: هر دو روش از تغییر پهنای پالس استفاده می کنند، اما هدف آنها متفاوت است. در PWM توان برای کنترل انرژی، و در PWM سروو برای کنترل موقعیت.
تولید سیگنال PWM چگونه انجام می شود؟
پس از اینکه دانستیم PWM چیست و چه کاربردهایی دارد، حالا نوبت آن است که ببینیم این سیگنال چگونه تولید می شود. هدف از تولید سیگنال PWM، ایجاد پالس هایی با پهنای متغیر و فرکانس ثابت است تا بتوان ولتاژ متوسط و در نتیجه توان خروجی را کنترل کرد.
در عمل، دو روش اصلی برای تولید سیگنال PWM وجود دارد:
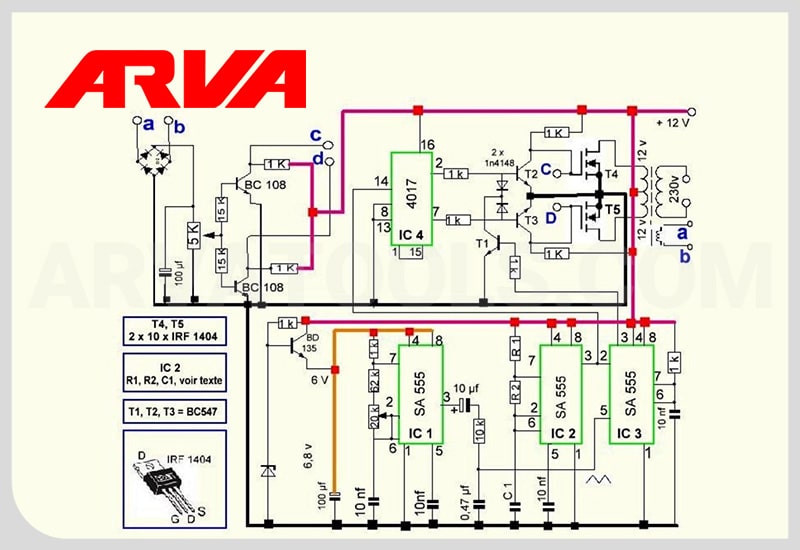
تولید با آی سی های مخصوص (مثل IC555)
آی سی معروف NE555 یکی از ساده ترین و پرکاربردترین ابزارها برای ایجاد سیگنال PWM است. این تراشه در حالت آستابل (نوسان ساز آزاد) کار می کند و با تغییر مقدار مقاومت یا خازن های متصل به آن، می توان چرخه کاری و فرکانس پالس ها را تنظیم کرد.
ویژگی های این روش:
- مناسب برای مدارهای ساده و آموزشی
- هزینه کم و طراحی آسان
- محدودیت در دقت و پایداری فرکانس در کاربردهای صنعتی
نمونه کاربرد: کنترل شدت نور LED یا سرعت موتورهای کوچک DC در مدارهای آزمایشی
تولید توسط میکروکنترلرها

در سیستم های پیشرفته تر، میکروکنترلرها (مثل Arduino، STM32 یا AVR) وظیفه تولید سیگنال PWM را بر عهده دارند. در این حالت، تایمر داخلی میکروکنترلر با دقت بالا، پالس هایی با فرکانس و چرخه کاری قابل برنامه ریزی ایجاد می کند.
مزایای این روش:
- دقت و پایداری بسیار بالا
- امکان تغییر لحظه ای پارامترها از طریق نرم افزار
- مناسب برای کاربردهای صنعتی و هوشمند
مثلاً در اینورترها یا درایو موتورهای صنعتی، که تفاوت عملکرد آن ها مهمترین فرق اینورتر و درایو است، مشخص می شود، میکروکنترلرها یا DSPها با الگوریتم های خاص، سیگنال PWM چندفاز و هماهنگ تولید می کنند تا شکل موج خروجی دقیق و بدون نویز باشد.
در نتیجه، تولید سیگنال PWM می تواند از یک مدار ساده با آی سی ۵۵۵ تا یک سیستم پیچیده مبتنی بر میکروکنترلر یا پردازنده دیجیتال انجام شود. تفاوت در دقت، سرعت و قابلیت کنترل است، اما هدف یکی است: تولید پالس هایی هوشمند برای کنترل انرژی.
در نگاه ساده: PWM یعنی روشن و خاموش کردن سریع ولتاژ برای تنظیم توان.
در نگاه تخصصی: PWM یعنی کنترل زمان روشن بودن پالس ها در هر سیکل با استفاده از تایمر و مقایسه کننده، بدون تغییر سطح ولتاژ واقعی.
مدار و ماژول PWM چیست؟
مدار یا ماژول PWM در اصل یک سیستم سخت افزاری تولید پالس است که با تنظیم پهنای پالس ها، توان یا ولتاژ متوسط خروجی را کنترل می کند.
از این مدارها برای کنترل سرعت موتورهای DC، تنظیم نور LED، کنترل دمای المنت ها و حتی در سیستم های تهویه خودرو استفاده می شود.
ماژول های آماده PWM معمولاً در قالب یک برد کوچک فروخته می شوند که دارای:
- پتانسیومتر برای تنظیم چرخه کاری
- چیپ تولید پالس (مثلاً NE555 یا LM358)
- خروجی ترانزیستوری برای اتصال به بار (مثل موتور یا لامپ)
در برخی مدل ها، نمایشگر دیجیتال برای نمایش درصد چرخه کاری است.
مثال ساده: ماژول PWM DC Motor Controller با ولتاژ کاری 12 تا 24 ولت می تواند به صورت دقیق دور موتور را کنترل کند، بدون اینکه نیازی به تغییر ولتاژ تغذیه باشد.
اجزای اصلی مدار PWM
برای سهولت بررسی اجزاس مدار PWM آن ها را در جدول زیر قرار داده ایم و در مورد هر یک توضیحی مختصر داده ایم.
|
جزء |
توضیح |
نمونه قطعه |
| مولد پالس (Oscillator) | وظیفه ایجاد سیگنال مربعی با فرکانس ثابت را دارد. | آی سی NE555 یا تایمر داخلی میکروکنترلر |
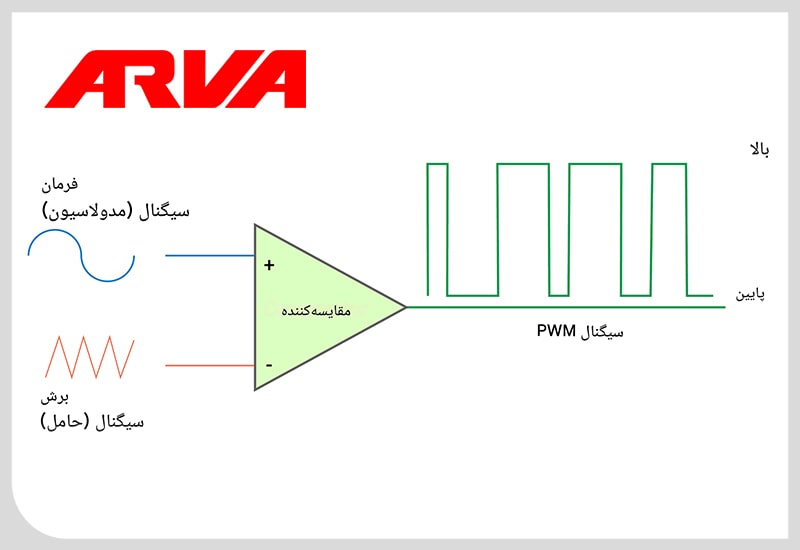
| مدولاسیون کننده (Modulator) | پهنای پالس را بر اساس سیگنال کنترلی (مثلاً ولتاژ ورودی یا فیدبک) تغییر می دهد. | اپ امپ یا مدار مقایسه کننده |
| درایور خروجی (Driver) | جریان خروجی را برای بارهایی مثل موتور یا LED تقویت می کند. | ترانزیستور، MOSFET، IGBT |
| منبع تغذیه (Power Supply) | ولتاژ موردنیاز مدار PWM را تأمین می کند. | رگولاتور 7805 یا مبدل DC-DC |
| فیلتر خروجی (Optional) | اگر نیاز به ولتاژ صاف باشد (مثلاً در منابع تغذیه)، پالس های PWM را فیلتر می کند. | خازن و سلف |
♦️ نکته: در مدارهای دقیق تر، معمولاً از PWM سخت افزاری (Hardware PWM) استفاده می شود چون پایداری، فرکانس و دقت بالاتری دارد.
اما در پروژه های ساده یا آموزشی، PWM نرم افزاری (Software PWM) با استفاده از تأخیرهای زمانی یا تایمرهای نرم افزاری کافی است.
جمع بندی:
مدار PWM، قلب سیستم های کنترلی است؛ از ماژول های ساده ی مبتنی بر آی سی 555 گرفته تا درایورهای صنعتی IGBT.
هدف اصلی همه شان یکی است: کنترل هوشمند توان با کمترین تلفات و بیشترین دقت.
فیلتر RC و تبدیل PWM به ولتاژ آنالوگ
سیگنال PWM پالس هایی با دو سطح (۰ و Vin) است. اگر این پالس ها را از یک مقاومت سری و سپس یک خازن به زمین عبور دهیم (فیلتر RC)، خازن میانگین ولتاژ را نگه می دارد و خروجی به صورت ولتاژ تقریباً پیوسته ظاهر می شود. تقریب ولتاژ خروجی در حالت پایدار:
Vout ≈ D × Vin
که D درصد چرخه کاری است.
فرمول های کلیدی
فرکانس قطع فیلتر:
fc = 1 / (2πRC)
تقریب دامنه پیک تا پیک ریپل (برای حالت نوسان کوچک — فرض RC ≫ Tpulse):
ΔVpp ≈ (Vin × D(1 – D)) / (fPWM × R × C)
توضیح فرض ها:
فرمول ریپل بر پایه یک تقریب خطی است و وقتی صافی فیلتر نسبت به پالسی که می خواهیم صاف کنیم قوی تر باشد (یعنی RC بزرگ تر از زمان پالسی)، معتبرتر است.
مثال عملی فرض کنیم:
Vin = 12 V
fPWM = 20 kHz
D = 0.6
R = 10 Ω
C = 330 μF
فرکانس قطع:
fc = 1 / (2π × 10 × 330×10^(-6)) ≈ 48 Hz
(که خیلی کمتر از fPWM = 20 kHz است؛ یعنی فیلتر قوی است.)
ولتاژ متوسط خروجی:
Vout ≈ 0.6 × 12 = 7.2 V
تقریب ریپل پیک تا پیک:
ΔVpp ≈ (12 × 0.6 × 0.4) / (20000 × 10 × 330×10^(-6)) ≈ 0.044 V (≈ 44 mV)
زمان نشست تقریبی:
5RC = 5 × 10 × 330×10^(-6) ≈ 16.5 ms
این مثال نشان میدهد که با فرکانس PWM بالا و یک خازن نسبتاً بزرگ، میتوان ولتاژ آنالوگ صاف با ریپل کم بهدست آورد.
اگر ریپل کمتر لازم باشد، باید مقدار C را افزایش دهید، یا R را کاهش دهید، یا فرکانس PWM را بالاتر ببرید.
تبدیل سیگنال های PWM به ولتاژ آنالوگ چگونه صورت می پذیرد؟
برای اینکه PWM را به یک ولتاژ آنالوگ پیوسته تبدیل کرد، از فیلتر پایین گذر RC استفاده می کنیم. در ادامه، توضیح مختصر ولی دقیق ارائه می دهیم:
در این فیلتر، مقاومت (R) و خازن (C) طوری با هم ترکیب می شوند که مؤلفه های فرکانس پایین (میانگین سیگنال PWM) را عبور دهند و مؤلفه های فرکانس بالا (پالسهای تند PWM) را تضعیف کنند.
به عبارت دیگر، خازن انرژی پالس های متوالی را ذخیره کرده و به تدریج تخلیه می کند، در نتیجه ولتاژی تقریباً پیوسته در خروجی ظاهر می شود که مقدار آن متناسب با چرخه کاری است.
Vin (PWM)
│
R
│
├─── Vout (ولتاژ صافشده)
│
C
│
GND
در این مدار:
- مقاومت R جریان را محدود و زمان شارژ خازن را کنترل می کند.
- خازن C میانگین ولتاژ را نگه می دارد و نویز پالس ها را حذف می کند.
- خروجی Vout ولتاژی تقریباً ثابت و متناسب با چرخه کاری خواهد بود.
نتیجه اینکه:
با انتخاب مناسب R و C (به گونه ای که fc بسیار کمتر از fPWM باشد)، خروجی PWM می تواند به صورت یک ولتاژ آنالوگ نرم، پایدار و دقیق ظاهر شود.
اگر ریپل بیش از حد باشد، می توان با افزایش ظرفیت خازن یا افزایش فرکانس PWM، ولتاژ خروجی را صاف تر کرد.
اینورتر PWM چیست؟
اینورتر PWM یا مدولاسیون پهنای پالس (Pulse Width Modulation Inverter) نوعی مبدل الکترونیکی است که جریان مستقیم (DC) را به جریان متناوب (AC) با شکل موجی بسیار شبیه به موج سینوسی واقعی تبدیل می کند.
در واقع، اگر بخواهیم ساده تر بگوییم، اینورتر PWM قلب تپندۀ سیستم های الکترونیکی قدرت است که با کنترل دقیق مدت زمان روشن و خاموش بودن پالس ها، توان خروجی را به صورت کاملاً هوشمند تنظیم می کند.
انواع اینورتر PWM کدام اند؟

همانطور می دانید در مبحث همه اینورترها ما با انواع اینورتر مواجه هستیم و این مورد برای اینورتر PWM نیز صادق است.
در این بخش برای اینکه بهتر متوجه شوید اینورتر PWM چیست و چگونه در صنایع مختلف به کار می رود، خوب است با انواع آن آشنا شوید. هر نوع اینورتر PWM روش خاصی برای تولید و کنترل پالس ها دارد و در نتیجه عملکرد و بازده متفاوتی ارائه می دهد. معمولاً اینورترهای PWM بر اساس دو معیار اصلی طبقه بندی می شوند:
- بر اساس روش مدولاسیون پهنای پالس
- بر اساس تعداد فازهای خروجی AC
در ادامه در مورد هر یک توضیحی خواهیم داد.
انواع اینورتر PWM بر اساس روش مدولاسیون پهنای پالس
این دسته بندی بر اساس نحوه تغییر پهنای پالس ها برای شکل دهی موج خروجی انجام می شود:
اینورتر SPWM چیست و چه کاربردی دارد؟
در این روش، پهنای هر پالس بر اساس یک موج سینوسی مرجع تعیین می شود. به عبارتی، کنترل کننده تلاش می کند خروجی نهایی را تا حد ممکن به شکل موج سینوسی واقعی نزدیک کند.
نتیجه اش کاهش اعوجاج هارمونیکی (THD) و تولید برق تمیزتر برای تجهیزات حساس است. به همین دلیل، SPWM در درایو موتورهای الکتریکی، منابع تغذیۀ قابل تنظیم و سیستم های UPS کاربرد زیادی دارد.
اینورتر SVPWM چیست و چه تفاوتی با مدل های دیگر دارد؟
SVPWM نسل پیشرفته تر SPWM است. این روش با استفاده از مدل سازی برداری فضا (Space Vector) می تواند از کل ولتاژ ورودی DC بیشترین استفاده را ببرد.
به زبان ساده، کنترل در این حالت دقیق تر و پاسخ سیستم سریع تر است. راندمان بالا و کاهش تلفات کلیدزنی از ویژگی های اصلی آن است.
این نوع اینورتر PWM معمولاً در درایوهای صنعتی، موتورهای سه فاز و سیستم های کنترل دور به کار می رود.
اینورتر UPWM چیست و در چه شرایطی استفاده می شود؟
در این نوع، فواصل زمانی بین پالس ها ثابت است، اما پهنای هر پالس تغییر می کند. این ساختار باعث ساده تر شدن طراحی مدار می شود و برای کاربردهایی مناسب است که نیاز به کنترل خیلی دقیق ندارند.
اگر بخواهیم ساده بگوییم، UPWM نسخه ای اقتصادی تر از روش های دیگر است و در مدارهای ساده تر یا آموزشی استفاده می شود.
اینورتر DPWM چیست و چه مزایایی دارد؟
در این روش، در بخشی از سیکل کاری، کلیدها برای مدتی خاموش می مانند تا تلفات کلیدزنی کاهش یابد. همین ویژگی باعث می شود بازده کلی سیستم بالاتر برود، مخصوصاً در بارهای سنگین یا موتورهایی با توان بالا.
DPWM بیشتر در سیستم های صنعتی پیشرفته و اینورترهای با توان بالا مورد استفاده قرار می گیرد.
به همین دلیل، DPWM در سیستم های صنعتی با توان بالا و موتورهای سنگین به کار می رود.
هر یک از این روش ها به نوعی در بهبود عملکرد اینورتر PWM نقش دارند و انتخاب بین آن ها بسته به نوع کاربرد، هزینه و میزان دقت مورد نیاز انجام می شود.
انواع اینورتر PWM بر اساس تعداد فازهای خروجی AC

این دسته بندی بر اساس تعداد فازهای ولتاژ متناوب تولیدشده در خروجی اینورتر (تک فاز یا سه فاز) انجام می شود.
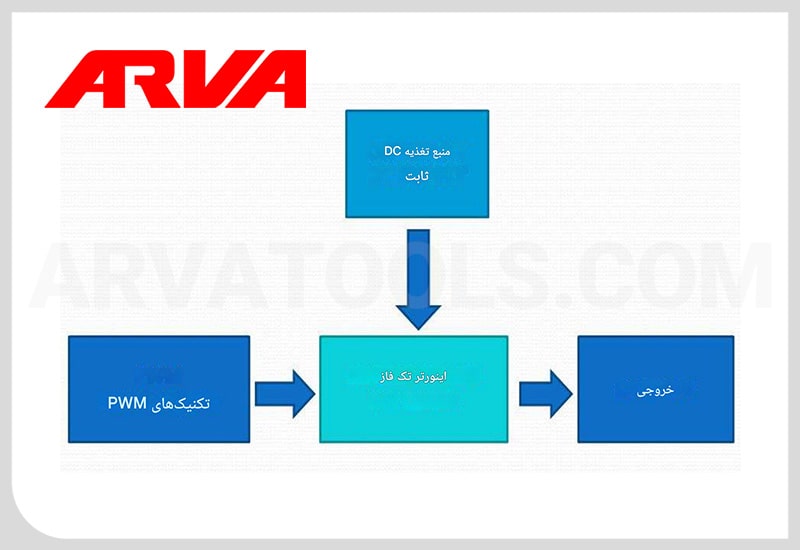
اینورتر PWM تک فاز (Single-Phase PWM Inverter)
در اینورتر تک فاز PWM، دو بازوی سوئیچینگ (معمولاً با ترانزیستور یا ماسفت MOSFET) به صورت پل H کار می کنند و خروجی AC تک فاز تولید می شود.
با تغییر چرخه کاری (Duty Cycle) پالس ها، ولتاژ و شکل موج خروجی کنترل می شود. ساختار آن فرق چندانی با یک اینورتر تک فاز معومولی ندارد.
ویژگی ها:
- مناسب برای توان های پایین و کاربردهای خانگی یا تک فاز صنعتی
- طراحی ساده تر و هزینه کمتر نسبت به مدل سه فاز
- کنترل دقیق ولتاژ و فرکانس خروجی با فرکانس سوئیچینگ بالا
کاربردها:
- درایو موتورهای DC و AC تک فاز
- منابع تغذیه سوئیچینگ (SMPS)
- سیستم های UPS و تجهیزات الکترونیکی خانگی
اینورتر PWM سه فاز (Three-Phase PWM Inverter)
در نوع سه فاز PWM، شش کلید نیمه هادی (IGBT یا MOSFET) در قالب سه بازوی پل کامل، سه خروجی با اختلاف فاز 120 درجه تولید می کنند.
با کنترل دقیق زمان روشن و خاموش شدن هر ترانزیستور، شکل موجی نزدیک به سینوسی و متعادل در سه فاز ایجاد می شود؛ درست مانند عملکرد اینورتر سه فاز در سیستم های صنعتی.
اگر بدانید که اینورتر سینوسی چیست، متوجه می شوید این همان نوعی از اینورتر است که با استفاده از PWM یا SPWM موج خروجی را تا حد زیادی به برق سینوسی واقعی شبکه نزدیک می کند و برای تغذیه موتورهای سه فاز و تجهیزات حساس ایده آل است.
ویژگی ها:
- تولید خروجی متعادل سه فاز برای موتورهای القایی و سنکرون
- توان بالا، راندمان عالی و اعوجاج هارمونیکی پایین
- امکان کنترل گشتاور، سرعت و جهت چرخش موتور با تغییر فرکانس PWM
کاربردها:
- درایو موتورهای صنعتی (VFD)
- سیستم های تهویه، پمپ ها و کمپرسورها
- اینورترهای خورشیدی و UPS صنعتی
تفاوت انواع موج خروجی در اینورتر PWM چیست؟

برای درک بهتر اینکه اینورتر PWM چیست و چگونه کار می کند، لازم است ابتدا با نوع موج خروجی آن آشنا شوید. شکل موج خروجی، یکی از مهم ترین شاخص ها در انتخاب و کارایی اینورترهاست؛ چون تعیین می کند که دستگاه تا چه حد می تواند جریان AC شبیه به برق شهری تولید کند.
در این بخش، سه نوع اصلی موج خروجی را بررسی می کنیم:
موج سینوسی (Pure Sine Wave)
این نوع موج، نزدیک ترین شکل به برق شهری واقعی است. در اینورترهایی که از PWM پیشرفته استفاده می کنند، پالس ها به گونه ای کنترل می شوند که خروجی، کاملاً نرم و پیوسته باشد.
مزیت اصلی موج سینوسی، پایداری بالا، صدای کمتر و هماهنگی کامل با تجهیزات حساس مانند موتورهای القایی، کولر گازی، لپ تاپ و تجهیزات پزشکی است.
به زبان ساده، اگر دقت و سلامت عملکرد دستگاه برایتان اهمیت دارد، موج سینوسی بهترین گزینه است.
بیشتر بخوانید: کولر اینورتر چیست
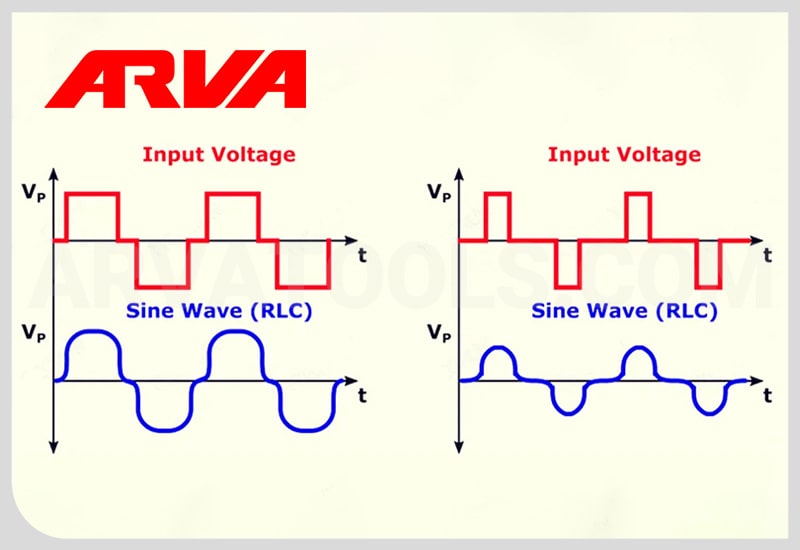
موج سینوسی اصلاح شده یا شبه سینوسی (Modified Sine Wave)
در این نوع، شکل موج خروجی کاملاً سینوسی نیست، بلکه از چند سطح ولتاژ پله ای تشکیل می شود که شکل کلی آن شبیه موج سینوسی به نظر می رسد اما پیوسته نیست.
این نوع خروجی در مقایسه با مدل سینوسی ارزان تر اما کم دقت تر است. ممکن است در برخی دستگاه ها، مانند موتورهای الکتریکی یا تجهیزات صوتی، نویز یا حرارت اضافی ایجاد کند.
با این حال برای وسایل عمومی تر مثل روشنایی، تلویزیون یا ابزارهای خانگی ساده عملکرد قابل قبولی دارد.
موج مربعی (Square Wave)
این نوع موج ساده ترین و ابتدایی ترین شکل خروجی است و در واقع تنها بین دو سطح ولتاژ مثبت و منفی تغییر می کند.
در نتیجه، موج خروجی خشن، با اعوجاج زیاد و بازده پایین به دست می آید. این مدل برای وسایل الکترونیکی یا موتوردار مناسب نیست و امروزه تقریباً منسوخ شده است.
با این وجود، در برخی کاربردهای خاص یا مدارهای آموزشی ساده ممکن است هنوز از آن استفاده شود.
به طور خلاصه، هرچه موج خروجی اینورتر PWM به شکل سینوسی خالص تر نزدیک تر باشد، کیفیت و ایمنی عملکرد تجهیزات برقی بیشتر است. به همین دلیل، در طراحی های جدید صنعتی تقریباً همیشه از اینورترهای PWM با موج سینوسی خالص استفاده می شود.
دیاگرام بلوک اینورتر PWM
در ادامه یک دیاگرام بلوک ساده اما کامل از ساختار معمولی یک اینورتر PWM نمایش داده ایم تا متوجه شوید «اینورتر PWM چیست» و هر بخش چه نقشی ایفا می کند. بعد از دیاگرام، هر بلوک را با زبان تخصصی ولی قابل فهم برای همه توضیح داده ایم.
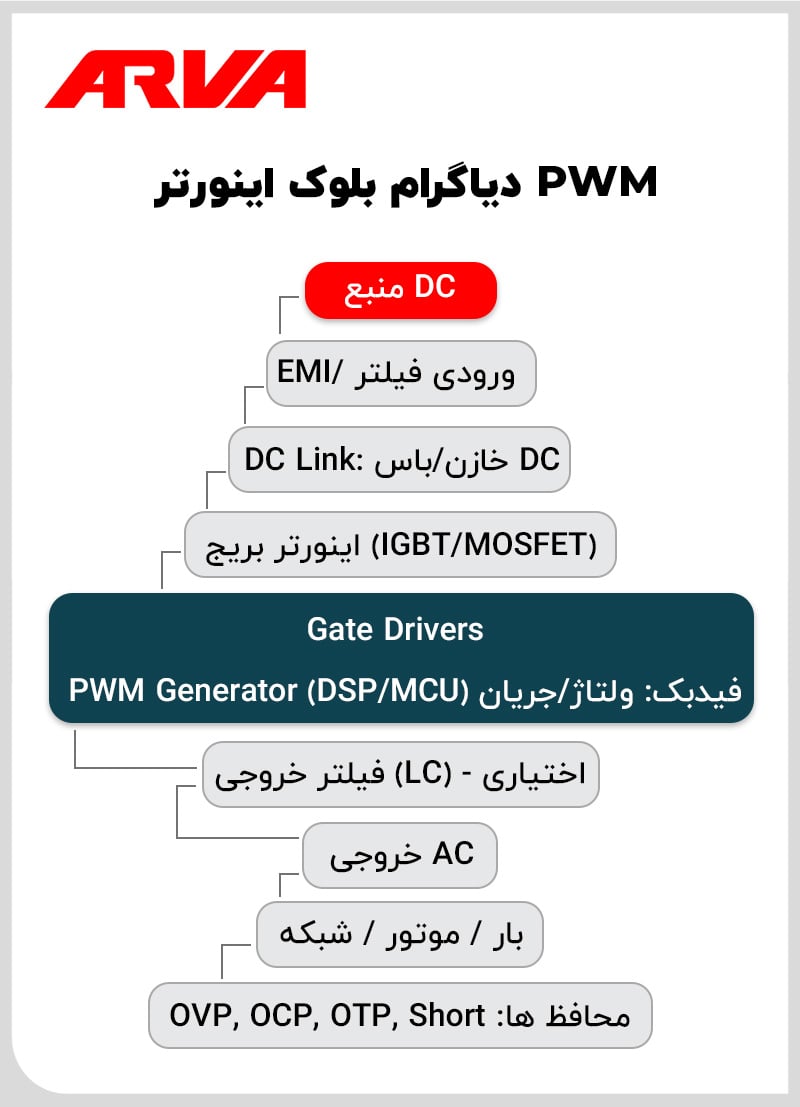
شرح کوتاه و نقش هر بلوک در دیاگرام بلوک اینورتر PWM
منبع DC
باتری، پنل خورشیدی یا منبع دی سی تغذیه که انرژی اولیه را فراهم می کند.
EMI / ورودی فیلتر
نویز سوئیچینگ را کاهش می دهد و از بازگشت تداخل الکترومغناطیسی به شبکه ٔ DC جلوگیری می کند.
DC Link (خازن/باس DC)
انرژی ذخیره سازی موقت، ایجاد ولتاژ ثابت برای اینورتر و کاهش ریپل ولتاژ؛ نقش حیاتی در پایداری سیستم دارد.
اینورتر بریج (سوئیچ ها: IGBT یا MOSFET)
از طریق سوئیچینگ سریع، ولتاژ DC را به پالس های قابل کنترل تبدیل می کند. آرایش سه فاز یا تک فاز بسته به کاربرد متفاوت است.
بیشتر بخوانید: تفاوت ماسفت و IGBT در اینورترهای جوشکاری
Gate Drivers
تقویت کننده های درایو که سیگنال های PWM را به ولتاژ و جریان لازم برای روشن/خاموش کردن سوئیچ ها تبدیل می کنند و زمان مرده (dead-time) را اعمال می کنند.
PWM Generator / کنترل کننده (DSP, MCU, FPGA)
هستهٔ کنترلی: الگوریتم های SPWM یا SVPWM را اجرا می کند، فیدبک ها را می خواند و سیگنال های فرمان برای gate drivers تولید می کند — اینجا محل تحقق مفهوم «اینورتر PWM چیست» از نظر کنترل است.
فیلتر خروجی (LC) — در صورت نیاز
پالس های PWM را صاف می کند تا موج خروجی نزدیک تر به سینوسی شود؛ مخصوصا در کاربردهای حساس به اعوجاج.
خروجی AC و بار
خروجی نهایی که به موتور، شبکه یا مصرف کننده تغذیه می دهد.
حفاظت ها و مانیتورینگ
مدارهای OVP (ولتاژ بیش از حد)، OCP (جریان بیش از حد)، OTP (دما) و حفاظت اتصال کوتاه؛ لاگ و آلارم برای ایمنی و پایداری.
فیدبک و حلقه کنترل
سنسورهای ولتاژ و جریان → مبدل آنالوگ به دیجیتال → الگوریتم کنترل → تولید PWM؛ این حلقه تضمین کننده پایداری ولتاژ، فرکانس و کنترل گشتاور در موتور است.
نکات طراحی و عملی اینورتر PWM
زمان مرده (Dead-time) بین سوییچ ها برای جلوگیری از اتصال کوتاه همزمان لازم است.
Snubber / RCD برای حفاظت از ولتاژ برگشتی سوئیچ ها ضروری است.
مسیر جریان برگشتی و زمین باید کوتاه و با پهنای کافی طراحی شود تا نویز و تلفات کاهش یابد.
برای دستیابی به موج سینوسی بهتر از SVPWM یا فیلتر LC استفاده می کنند؛ در کاربردهای صنعتی SVPWM معمول است.
کاربردهای کلیدی اینورترهای PWM در صنعت و تجهیزات برقی

برای اینکه دقیق تر بدانیم اینورتر PWM چیست و چرا به یکی از مهم ترین اجزای سیستم های الکتریکی مدرن تبدیل شده، باید نگاهی به کاربردهای اصلی آن داشته باشیم. اینورترهای PWM به دلیل کنترل دقیق ولتاژ و فرکانس، بازده بالا و تولید موج خروجی تمیز، در حوزه های مختلفی به کار می روند.
در ادامه مهم ترین کاربردهای اینورتر PWM را به صورت تفکیک شده و با توضیح کوتاه مرور می کنیم
کنترل سرعت و گشتاور موتورهای الکتریکی
یکی از اساسی ترین کاربردهای اینورتر PWM، در درایوهای فرکانس متغیر (VFD) است. با تغییر فرکانس پالس های PWM، سرعت و گشتاور موتورهای القایی، سنکرون یا DC به صورت دقیق کنترل می شود.
اگر بدانید که vfd چیست حتما متوجه هستید که این فناوری باعث کاهش مصرف انرژی، افزایش عمر موتور و کاهش ضربه های مکانیکی در شروع یا توقف می شود.
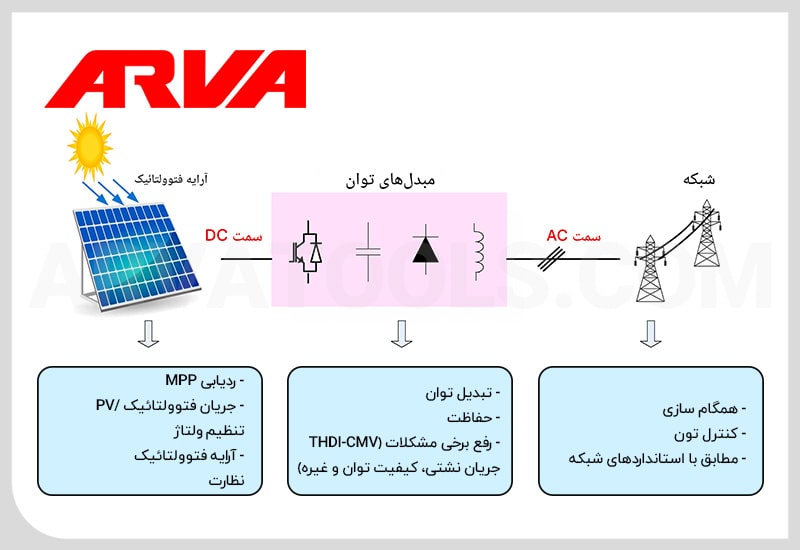
سیستم های خورشیدی (Solar Inverters)
در سیستم های انرژی خورشیدی، برق تولیدی پنل ها به صورت DC است. اینورتر PWM با تبدیل این جریان به AC و هم زمان هماهنگ سازی فرکانس و فاز با برق شهری، امکان تزریق برق به شبکه یا تغذیۀ تجهیزات خانگی را فراهم می کند.
مدل های SVPWM در این حوزه به دلیل راندمان بالا بسیار پرکاربردند.
کلام آروا:
در این مطلب تلاش کردیم تا پاسخی جامع به دو پرسش مطرح شده در این بحث، ارائه دهیم و به زبانی ساده بگوییم که PWM چیست و همچنین اینورتر PWM چیست.
در صورتیکه سوالی در ذهن دارید یا برای هر بخش احتیاج به توضیحات تکمیلی حس می کنید، به صورت کامنت مطرح کنیدو کارشناسان آروا به سرعت پاسخ شما را خواهند داد.
سوالات متداول در مورد PWM چیست
1- PWM خوب است یا بد؟
در فرکانس بالا خوب و بی ضرر است، در فرکانس پایین ممکن است آزاردهنده باشد.
2- آیا PWM جریان AC است یا DC؟
PWM روی جریان DC اعمال می شود، نه AC.
3- چرا LED با PWM کم نور می شود اما تغییر رنگ نمی دهد؟
چون ولتاژ کامل دارد اما زمان روشن بودن کمتر می شود، نه شدت نور یا رنگ.
4- آیا LED ها از PWM استفاده می کنند؟
بله، LEDها از PWM (مدولاسیون پهنای پالس) برای کنترل میزان روشنایی استفاده می کنند.



ارسال دیدگاه